高精度、高稳定性
机器人系统采用先进的传感器和控制技术,实现高精度焊接作业,确保焊接质量稳定一致。RV减速器与伺服电机共轴,减少装配误差,提高接头精度,延长使用寿命。
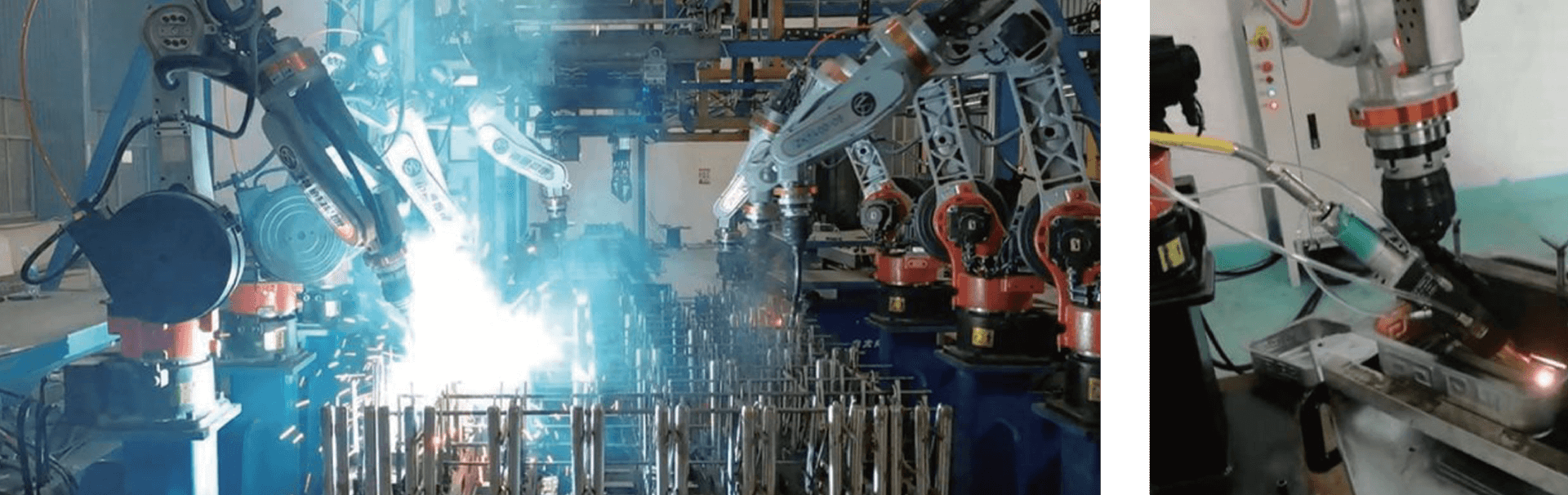
生产效率高
机器人系统可高速、连续作业地完成焊接任务,大大提高生产效率,可连续工作,无需休息或加班,从而降低生产成本。
灵活性和适应性
我们的焊接机器人系统具有灵活的编程能力,能够适应各种焊接要求,可轻松适应不同形状和尺寸的工件,并执行多种焊接工艺。


高精度、高稳定性
机器人系统采用先进的传感器和控制技术,实现高精度焊接作业,确保焊接质量稳定一致。RV减速器与伺服电机共轴,减少装配误差,提高接头精度,延长使用寿命。
生产效率高
机器人系统可高速、连续作业地完成焊接任务,大大提高生产效率,可连续工作,无需休息或加班,从而降低生产成本。
灵活性和适应性
我们的焊接机器人系统具有灵活的编程能力,能够适应各种焊接要求,可轻松适应不同形状和尺寸的工件,并执行多种焊接工艺。
数据收集与分析
通过为每个焊接自动生成的日志报告来管理和跟踪关键焊接参数,以便进行准确的故障排除和增强质量控制实践。这有助于优化生产工作流程,改善质量控制并执行预防性维护。
实际数据 (ZK) | 参考数据 (Import) | 测试速度 | 测试程序 | |
| 位置重复精度RP(位置重复精度) | 0.063 | ±0.07 | 60m/min | A |
| 直线精度ATp(轨迹精度) | 0.322 | 0.500 | 2m/min | B |
| 轨迹重复精度 RTp | 0.060 | / | 2m/min | A |
| 轨迹速度精度AV | 0.034% | / | 2m/min | A |
| 轨道速度重复性 RV | 0.025% | / | 2m/min | A |
| 位置超调 | 0.052 | 0.050 | 2m/min | A |
| 圆度大 1 | 0.617 | / | 2m/min | A |
| 圆度大 2 | 0.402 | / | 2m/min | B |
圆度小 | 0.286 | 0.300 | 2m/min | A |
单位: mm


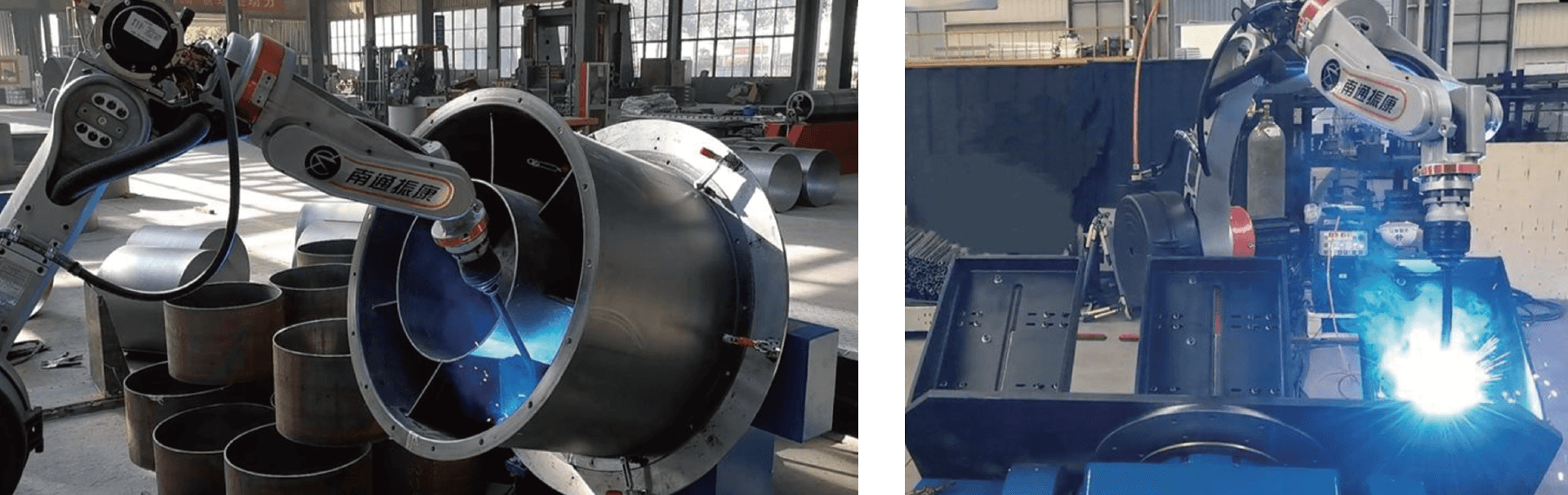
适用于焊接多种材料(S.S./M.S./Alu./TA.)
MAG 焊接 /TIG 焊接 /激光焊接
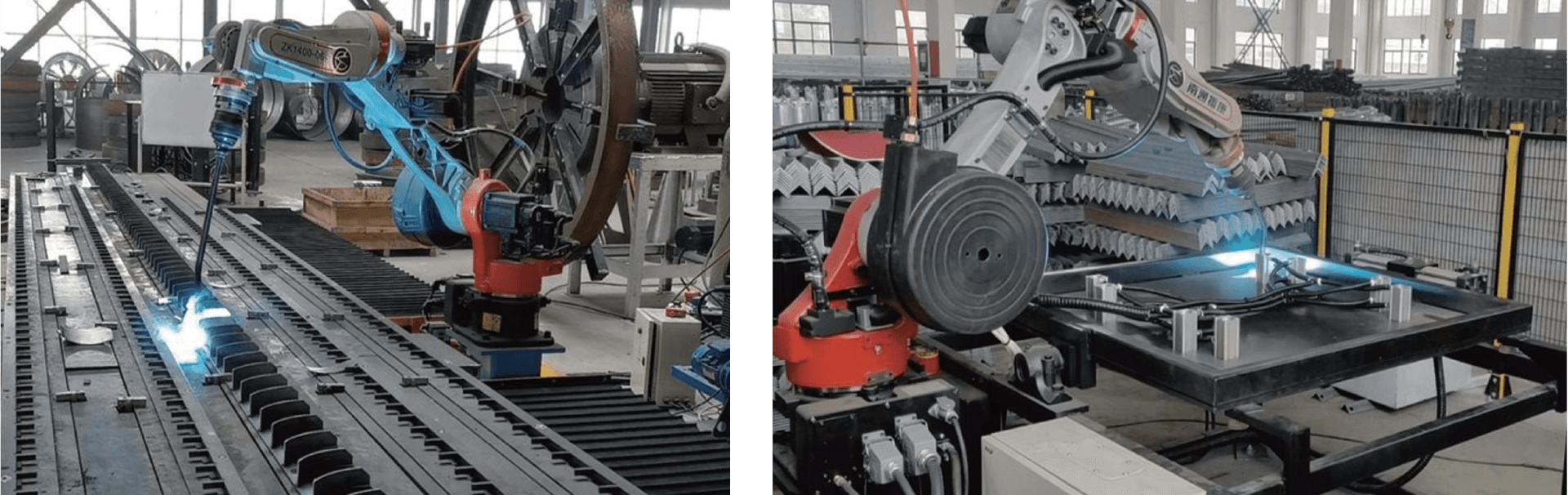
ZK1400-06
| 机器人模型 | ZK1400-06 | |
| 应用 | 电弧焊机 | |
| 安装方法 | 地面安装、吊装、侧装安装 | |
| 轴数 | 6-axis | |
| 最大负载 | 10KG | |
| 最大工作半径 | 1400mm | |
| 位置重复性 | 0.07mm | |
| 总体重 | 185KG | |
| 控制箱重量 | 26KG | |
| 输入功率 | 3P AC220V 50Hz | |
| 容量 | 6KVA(机器人)+24KVA(焊接电源) | |
| 适用环境 | 温度 | 0~45℃ |
| 湿度 | 20%~80% RH | |
其他 | 请远离腐蚀性气体或液体或爆炸性气体、水、油、灰尘、震源、磁场、高频信号源。 | |
| 轴数表现 | 运动范围 | 最大速度 |
J1 | ±180° | 176°/s |
| J2 | -70°~+110° | 173°/s |
| J3 | -120°~+70° | 170°/s |
| J4 | ±150° | 295°/s |
| J5 | -110°~+106° | 390°/s |
| J6 | ±320° | 307°/s |
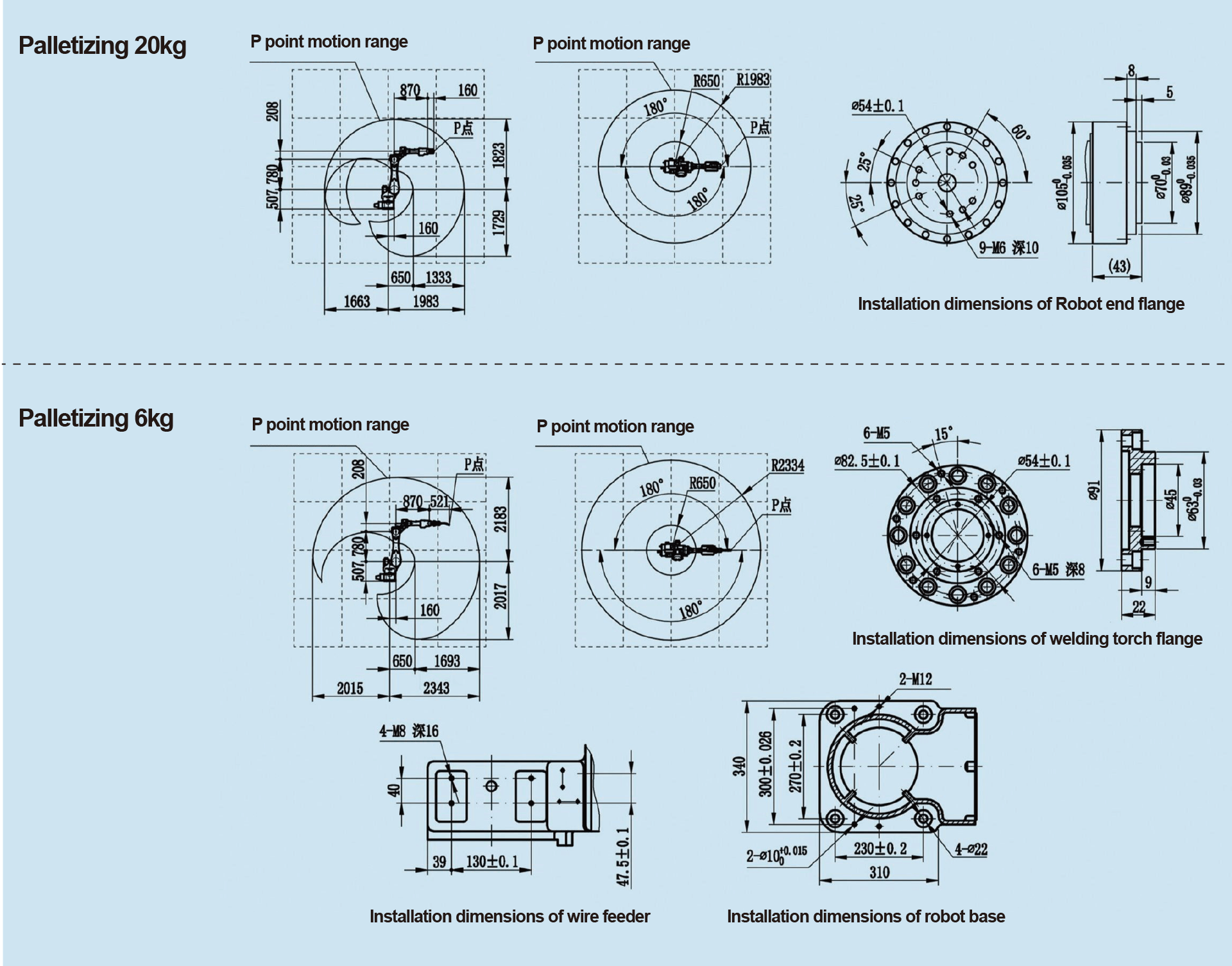
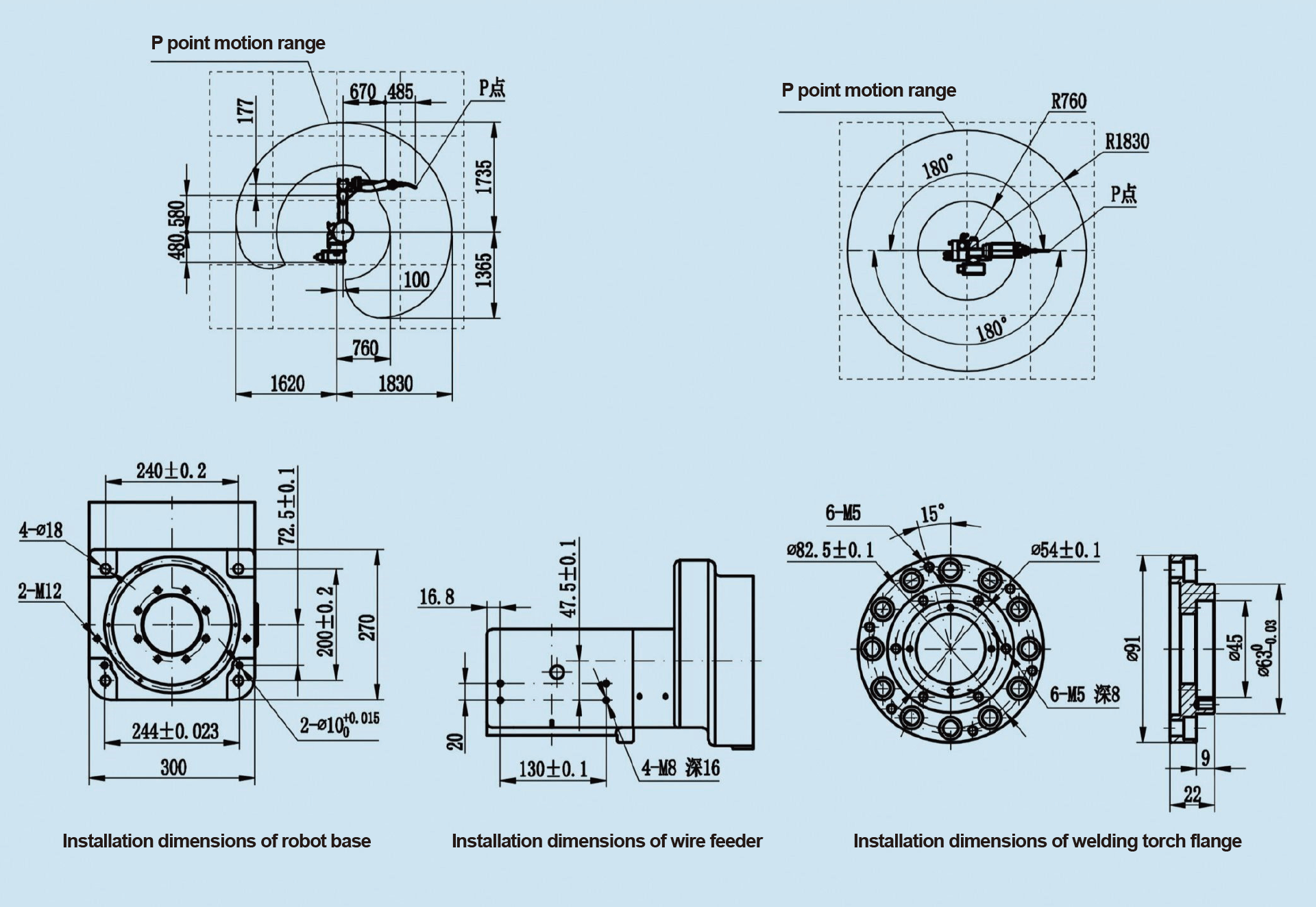
关节运动范围(P点运动范围)
ZK1900-06/ZK1900-20
| 机器人模型 | ZK1900-06/ZK1900-20 | |
| 应用 | 电弧焊机 | |
| 安装方法 | 地面安装、吊装、侧装安装 | |
| 轴数 | 6轴 | |
| 最大负载 | 6KG/20KG | |
| M最大工作半径 | 1900mm | |
| 位置重复性 | 0.07mm | |
| 总体重 | 285KG | |
| 控制箱重量 | 26KG | |
| 输入功率 | 3P AC220V 50Hz | |
| 容量 | 8KVA(机器人)+24KVA(焊接电源) | |
| 应用 环境 | 温度 | 0~45℃ |
| 湿度 | 20%~80% RH | |
其他 | 请远离腐蚀性气体或液体或易爆气体、水、油、灰尘、地震源、磁场和高频信号源。, | |
| 轴的数量表现 | 运动范围 | 最大速度 |
J1 | ±180° | 153°/s |
| J2 | -70°~+110° | 111°/s |
| J3 | -120°~+70° | 148°/s |
| J4 | ±150° | 200°/s |
| J5 | -110°~+105° | 390°/s / 365°/s |
| J6 | ±320°/±360° | 307°/s / 297°/s |
关节运动范围(P点运动范围)